![[Photo de l'Auteur]](../../common/images/pcbot-autores-grande.jpg)
Vicente Egea, Jorge Garrido, Roberto Guzmán, Ranko Zotovic Roberto Guzman est spécialiste en Informatique (Système Physique), il a été Professeur et Chercheur dans le domaine de la robotique au Département des Systèmes et Automatismes de l'Université PolyTechnique de Valence, et aussi chercheur dans le Département de Gestion de Production et de Régulation à l'université de Fern-Hagen en Allemagne. En ce moment, il travaille dans le département Recherche et Développement de TMC-Electronics. Ranko Zotovic est ingénieur dans l'industrie. Il possède plusieurs années d'expérience dans l'implémentation et la conception industrielle de robots, automate de découpe, contrôle qualité, etc.... Il est actuellement professeur de Robotique et CAO/CFAO au Département des Systèmes et Automatismes de l'Université PolyTechnique de Valence. Jorge Garrido Serrano est spécialiste en Informatique (Système Physique) . Son activité principale a été la conception et le développement de l'architecture logicielle pour le PCBot. Il a remporte le prix Bancaja pour les Partenariats Industriels. En ce moment, il fait partie du projet européen "MobiNet" (Mobile Robotics Technology for Health Care Research) de l'université de Ferm-Hagen (Allemagne). Vicente Egea Mañas est spécialiste en Informatique
(Système Physique). Il a aussi remporte le prix Bancaja pour
les Partenariats Industriels pour la conception et l'implémentation
de l'architecture 'hardware' du PCBot. Il travaille actuellement au TGI.
Index:
|
Au Département des Systèmes et de l'Automatisation, nous
avons pris la décision de construire un véhicule autoguidé,
dans notre laboratoire, ne comportant aucun des inconvénients mentionnés.
Nous avons choisi d'utiliser une architecture basée sur une carte
PC pour ses avantages énormes : prix, puissance, compatibilité,
adaptabilité et la disponibilité de
matériels et de logiciels. L'utilisation des extensions temps réel
de RT-Linux a rendu beaucoup plus facile la réalisation de ce projet.
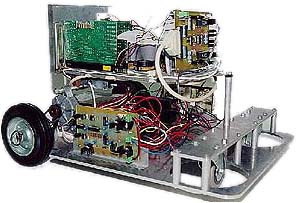 |
| Véhicule Autoguidé PC BOT 1.0 |
La conception distingue deux zones séparées : la région
basse, où tous les éléments mécaniques et électriques
sont situés, et la région supérieure qui est
encombrée avec tous les éléments de contrôle
et de communication. La région basse est montée sur un morceau
d'aluminium. A ce niveau, sont placées les roues, les réducteurs,
les moteurs, les encodeurs et les circuits de puissance, l'alimentation
et les batteries. Sur la région supérieure est montée
la carte PC ainsi que ses cartes de contrôle et le lecteur de disquette.
 |
| Vue de Face et de côté du PC BOT 1.0 |
 |
| Architecture Hardware |
Ces deux exigences, nous obligent à utiliser un système temps réel. Les systèmes d'exploitation temps réel sont ceux dont les performances dépendent non seulement des calculs mais aussi du temps avec lesquels, ils sont obtenus.
Nous avons donc décidé d'implementer l'architecture logicielle de PCBot avec un noyau Linux 2.0.33 et les extensions temps réel (version 0.6).
Les raisons d'utiliser Linux et RT-Linux sont les mêmes raisons qui poussent de nombreuses compagnies d'automatismes à implementer leur logiciel en utilisant ce système d'opération:
 |
| Le système temps réel RT-Linux |
Utiliser TCP/IP pour les échanges rend le robot indépendant du système d'exploitation qui tourne sur la machine distante. Le client relais les commandes saisies par l'utilisateur vers le robot. Il existe trois types de commandes : celles de mouvement, celles pour obtenir l'état du robot et enfin celles qui permettent de changer cet état. Le client vérifie la syntaxe de la commande entrée, construit le message adéquat pour le serveur et lui envoi en utilisant Sockets.
Le serveur attend constamment les connections venant du client. Une
fois la connexion établie, le serveur devient l'intermédiaire
entre le client et le module temps réel qui fait tourner les tâches
de contrôle. Le module temps réel exécute les commandes
acceptées par le robot. Il supervise aussi l'intégrité
du système grâce à sa tâche périodique
de type Watchdog.
 |
| Architecture Logicielle |
Le module temps réel est donc une suite de tâche temps réel (commandes de mouvement et tâches de surveillance WatchDog) et de tâche sporadique (pilotage et arrêt).
Un sémaphore binaire protège l'accès au hardware par les tâches temps réel. Nous avons besoins d'un sémaphore pour plusieurs raisons. Tout d'abord, la façon de comuniquer avec la carte de contrôle utilise un registre système si la tâche est interrompu par une autre tâche alors une donnée invalide sera écrite dans le registre. Ensuite, il existe des valeurs de registres qui sont la base de protocoles qui ne doivent pas être interrompus. Enfin, les transferts des actions de contrôle sur chaque axe doit être effectué de la façon la plus simultanée que possible.
Trois piles rt-fifo implémentent la communication entre les tâches temps réel et le serveur. Le serveur écrit la commande de mouvement, qui provient du client, sur la pile. Le module temps réel se sert des deux autres piles pour passer un accusé de réception au serveur ou pour faire part au client, via le serveur, d'une situation critique.
Une séquence classique se déroule donc comme celle-ci : l'utilisateur lance un processus client qui agit comme une interface entre le client et le PCBot. Après chaque commande saisie, le client la traite et l'envoie au serveur. Le serveur reçoit le message traité et le retraite avant de l'envoyer au module temps réel via la pile appropriée.
Un processus pilote, attaché à la pile, contrôle la commande et si un mouvement est demandé, lance la tâche temps réel nécessaire et renvoie une confirmation au serveur. La tâche ainsi démarrée va piloter les actions pour actionner les moteurs.
Derrière une commande de mouvement, l'utilisateur peut avoir envoyé une requête d'état ou un changement d'état. Dans ce cas, le même processus pilote réponds à la requête en lisant ou en écrivant vers les variables globales d'état.
Les variables globales sont allouées dans un espace mémoire
partagé par tous les modules temps réel et par le processus
pilote. Ces variables globales permettent une simple et rapide communication
entre ces tâches. Le "WatchDog" les surveille (en plus d'autres tâches)
et avertit le serveur des changements dans l'état du véhicule,
et aussi des situations anormales.
 |
| Architecture Logicielle - Tâches Système. |
Choisir Linux et son extension temps réel RT-Linux fut une décision très heureuse. Nous avons utilisé les puissant outils GNU de développement comme wpe (Windows Programing Environment) ou encore le compilateur GNU C sans frais supplémentaires.
Le système Linux n'a pas seulement démontré sa stabilité durant nos expérimentations mais il a aussi montrer qu'il sait gérer de façon très efficace les ressources machines, ce qui nous a permit d'utiliser une simple carte embarquée PC 486 sans jamais être pénalisé au niveau des performances ou du temps de développement (plusieurs utilisateurs en parallèle sur la machine). En fait, notre analyse de la disponibilité du système démontre que même dans le pire des cas, 70% du temps machine était libre.
Les logiciels utilisés durant le projet sont dans le domaine public, donc toutes les sources étaient accessibles durant tout ce temps. Cela nous a permit d'avoir une compréhension détaillée du fonctionnement du coeur du noyau temps réel, nous ouvrant les portes pour ajouter de nouvelles fonctionnalités (utiliser d'autres gestionnaires de temps, développer des pilotes temps réel, etc..) ce qui aurait impossible avec des véhicules commerciaux.
RT-Linux peut être facilement débuggué en temps réel en utilisant des techniques variés allant de la modification du noyau au stockage et à la visualisation de variables internes en invoquant la routine système printk.
Durant la période de développement, nous avons toujours
pu compter sur le soutient inconditionnel des membres de la liste de diffusion
à propos de RT-Linux et aussi sur la quantité grandissante de documentation
accessible.
Autre articles sur RT-Linux dans LinuxFocus:
Linux Temps réel
Linux Temps réel II
| Pages maintainues
par Eric Santonnaci
© Vicente Egea, Jorge Garrido, Roberto Guzmán, Ranko Zotovic LinuxFocus 1998 |